|

|
(1) 人体重心的位置
当人体姿势不变时,人体重心并非特指身体上某一固定点。它的位置是一个随机变 量,随着呼吸、消化、血液循环等生理过程的进行在一定范围内移动,其变化范围一般 在1.5~2厘米。据测定,正常站立时,人体重心一般在身体正中面上第三兼椎上缘前方 7厘米处。由于性别、年龄、体型不同,人体重心位置略有不同,一般男子重心位置的 相对高度比女子高。自然站立时,男子重心高度大约是身高的56%,女子大约是身高的 55%,主要是因为环节的重量分布不一样造成的。
(2) 支撑状态下身体重心的运动规律
在体育运动中的支撑状态下(人体与外界相接触),由于身体姿势的变化,重心位 置也随之变化。例如:手臂上举,重心升高;体后伸,重心后移;下蹲,重心下降;向 左体侧屈,重心左移;做大幅度的体前屈或体操“桥”动作时,人体重心可以移出体外 (图3-6-4 )o重心移动的方向总是与环节移动方向一致,并且重心移动的幅度取决于环 节移动的幅度,环节运动的幅度大,重心移动的幅度也大,并且其环节质量愈大,则重 心移动幅度愈大。因此,人体在完成维持静立姿势的过程中,当人体重心发生偏移,有 失去平衡的倾向时,人体能借助于补偿动作(身体姿势的变化)在一定范围内“中和” 或“抵消”重心的不适宜移动。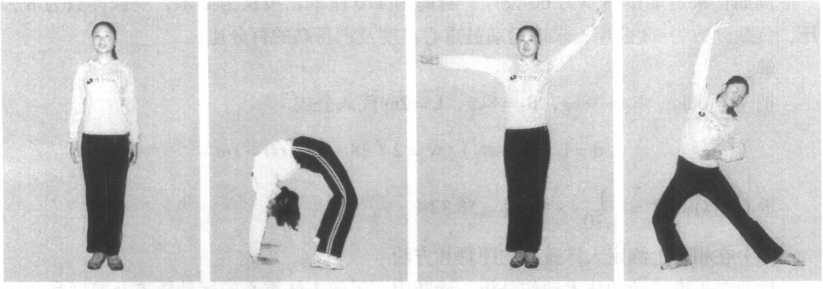
① ② ③ ④
图 3-6-4
2. 人体重心的测量方法
目前运动生物力学测量人体重心方法有两种,第一种是用重心板实测静态人体的重 心位置,第二种是从摄影和录像获得的人体图像中通过测量和计算获得。下面着重介绍 实测人体重心的方法。
(1)人体一维重心板测定原理与方法
一维重心板测定原理:设备是由一块长板(床板)和体重秤组成,如图3-6-5所 示。其力学原理是根据静力学中的力矩平衡方程进行重心位置的测定。我们已知运动员 的体重(W)、板的长度(L = AB)、空载时秤的读数(RQ与负载时秤的读数(R2),设 运动员的重心高度为d,现以脚跟处的A点求矩: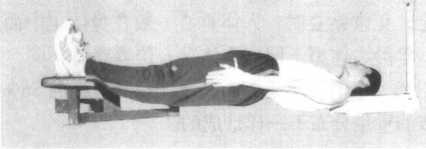
图 3-6-5
£M(b)= O
板子的力矩=L?Ri
人体的力矩= W?d
两者的合力矩= L-R2
L-R, + W-d-L-R2 = O
d = L (R2-R,)/W
例如:某运动员体重为60公斤,身高为170厘米,板长为2米,空载读数为8公 斤,负载读数为38公斤,求该运动员重心高度及占身高的百分比。
解:
把 W = 60kg, R2 = 38kg, R| = 8kg, L = 2m 代入公式
d = L ( R2 - R,) /W = 2 ( 38 - 8 ) /60 = Im
重心相对高度=x 100% = 58.82%
(2)在相片上测定人体重心的原理和方法
目前在柔道运动的技术动作分析与诊断中,了解人体重心的运动轨迹及速度和加速 度的变化规律是非常重要的。在实际应用中,对大量的影片或录像画面中的人体重心位 置的计算都在影片解析仪上进行。为了深入了解解析仪计算人体重心的基本原理和方 法,这里以一张相片上的人体动作中部分环节合重心的计算方法来说明图片法求重心的 原理和步骤。
图片法求重心的原理是根据力学中的合力矩定理进行计算的,在人体模型介绍中, 我们知道根据动作的特点,首先选取人体模型,然后确立图片中各关节点的位置,联接 各关节点,使图像成为直线联接图。下面通过计算上肢环节合重心说明求重心的原理与 方法。如图3-6-6所示,已知运动员的体重W,所采用的人体模型为日本模型。在0 点建立坐标系。首先确定上臂与前臂的重心位置。上臂与前臂的长度为AB与BC,分 别与对应的重心半径系数(R与Rz)相乘,确定上臂与前臂的重心(G与C2),手的重
心直接确定(C3),然后根据环节相对重量与 运动员体重确定上臂、前臂和手的重量R、P2 和P3O根据建立的坐标系确定各环节重心点 的坐标 c, (X,, Y,), C2 ( X2, 丫2), C3 ( X3, 丫3)。合重心C (Xc, Yc)的计算公式为:
Xc =Xc =P'X| + P2?X2+P3?X3
P| + P2 + Pj
Xc =
Xc =
V _ P.-Y. + P2-Y2+P3-Y3
L " P. + Pj+Ps
具体步骤如表3-6-4所示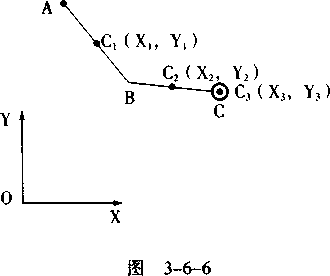
表3-6-4图片法计算上肢合重心
环节
节度
环长
环节质心 至近侧端长
环节重心坐标
环节重量
P1-X.
RY
重心
系数
实长
名称
Xj
相对绝对
(qi ) ( pi = qi?W )
前臂
AB
Ri
AB?R
X? Y,
q>
Pl
Pi-X,
PI*Y1
前臂
BC
r2
bc-r2
x2, y2
q?
p2
p2-x2
p2-y2
手
/
/
/
x3, y3
qa
p3
p3-x3
玲丫3
Y SP-Xi
Xc = ^pT
Yc-邛侦
-SPi
(三)柔道运动中的平衡及稳定性特征
1. 平衡
(1)平衡的力学条件
柔道运动中的技术动作是保持与破坏平衡动作的各种组合。当攻手施技时,要破坏 受手的平衡,而受手要保持平衡动作,防止平衡被破坏。因此,受手必须采用相应的技 术,具备了一定的力学条件,才能出现静止和平衡。这就是说,人体具备产生平衡的力 学条件后,其运动才能被限制,出现平衡状态。
为了使人体保持静止和平衡必须具备两个条件:
① 作用于人体的一切外力相互平衡,也就是通过人体重心的各力的合力应等于零, £F = 0。
② 作用于人体重心的各外力矩的总和也等于零,£M(°)=0。
在人体静力性动作中,能满足上述条件的重要因素是肌肉内力,它的大小取决于身 体各部分和整个身体相对于支点的位置。整个人体的平衡,主要是主动力(重力、拉 力、推力等)与约束反力(支撑反作用力)之间的平衡。
人体的局部平衡,主要是肌拉力矩与重力矩和阻力矩之间的平衡,即肌肉拉力X力 臂=环节重力X重力臂+阻力X阻力臂,如两臂前平举时手臂的平衡就是以上述理论 为依据的(此时阻力矩为零)。
(2
浏览10,080次