|

|
教学目的:
了解运动生物力学在散手运动中的作用与意义;学习散手运动中所涉及到的有关运 动生物力学的知识,并能应用有关原理对运动技术动作作出简单的分析。
教学安排:总时数20学时。其中讲授18学时,讨论2学时。
一、微手技术的运渤堂粉力修原理与特点
对抗性的技击内容是散手的基本特征。比赛双方没有固定的动作顺序,而是可以对 方技击动作随机转移,相互间尽可能地捕捉战机指向对方的弱点斗智、较技,这就要求运 动员在熟练掌握散手技术的基础上,合理而准确地应用一些运动生物力学原理,以灵活、 巧妙、多变的技术风格战胜对手。那么散手运动中究竟与运动生物力学的哪些原理有关 呢?这正是本节要阐述的内容。
(一)受力形式与稳度
力的性质:.人体的运动离不开力,而力乂分为外力、内力、约束反力和主动力。外力 是指外界对研究对象的作用力,内力是指研究对象内部之间相互作用的力。外力与内刀 的区别并非绝对的,由研究对象的不同而异。在甲、乙两人比赛中,如果将甲整个身体作 为研究对象时,凡由甲的外部的物体(地球、对方的击打等)作用于甲身上的力是外力;身 体各环节间的相互作用力,如肌力、关节力等是内力。如果将身体的某一部分,例如上肢 作为研究对象时,凡由上肢以外的环节(包括躯干)作用于上肢的力称为外力。因此,躯干 作用于上肢的肌肉力、肩胛骨作用于肱骨头的关节力是外力,而上肢内部之间相互作用 的力,如上臂与前臂、前臂与手之间的肌肉力、关节力都是内力。
凡是可做任意运动的物体称为自由体,若是物体上某处受到一定限制,使该处不能 沿某方向运动,则该物体称为非自由体。这种阻止物体运动的限制称为约束,由约束而引 起的对物体的作用力称为约束反力。
与约束反力性质相反,有些力主动地使物体运动,或使物体有运动的趋势,这种力在 力学上称为主动力。如人体所受的重力,运动员间的相互打击反作用力等便是主动力.
受力形式:散手运动中运动员的受力形式与自然界中物体的受力形式样,即有 压缩、拉伸、弯曲、扭转、剪切等。这些种类的受力形式对人体而言,有时独立存在,有时几 种形式同时存在。但无论是哪一种情况,一般都是多个力同时作用于人体,因而在力学中 把多个力同时作用于研究对象时称这些力群为力系。在力学中由于各力作用于研究对象 的方向和作用点不同,因而力系又■可分成共线力系、共面汇交力系、共而平行力系、共面一 般力系以及空间力系。
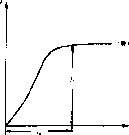
(1)共面汇交力系的简化与平衡:对于非平衡共而汇交力系简化的结果必定是一个合 力,如一击冲拳的受力(图2-14)。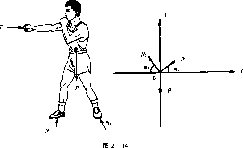
如果用解析法求该运动员受的力,则由力的正交分解原理,将所受的力逐一向X、K 两坐标轴分解,便使之成为一个在X轴上的共线力系;另一个成为在Y轴上的共线力系, 然后根据力的合成原理求得其合力。
即:Rx= T+ N\x-N&
=T + Mcosoti - Nicosai
Ry = £ Fy = + Ni,~ P
=iVisinoti +N2sinou - P
所以合力为:R=刷F,方向为:a=f广卷
如果该力系使人体保持平衡,则必须满足两个条件:
即 £ Fix = 0, £ Fiy = 0
或£斥=0,£豚。=0( 0点不在丫轴上)
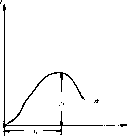
(2)共面一般力系的简化与平衡:对于非平衡共而一般力系简化的最后结果是一个合 力或一个合力偶。这种形式的力系在散手运动中是最常见的,如图2-15所示,当甲抱腿 别腿时乙的受力情况。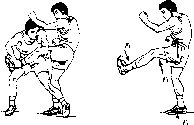
如果要求乙所受的合力及方向,其方梭与共面汇交力系完全相同。但求力系对简化 中心0点的合力矩,只需将力系中所有力对0点的力矩代数和,即有:
£ Mo = FiLi - FiLi — FiLi
至于合力R对简化中心的力臂,则用力矩合成原理,即:力系中各力对简化中心的力 矩之和等于该力系的合力对简化中心的力矩。
即:RZ,= £Mo .■.L=lMo/R = lFiLi/R
如果在这样的受力情况下要保持平海,则必须满足的条件可用下面三种不同形式中 的任意一种表示,即:
基本形式:£ Fa= 0, £ Fty = 0, £ Mo =0
二力矩形式:£ Fg = 0, £ Mo= 0, £ M。' = 0
式中X表示力平面内任意一轴,Q与/是力平面内任意两点,但经过点0与/的直 线不得与X轴垂直。
三力矩形式:£ = 0, £ M。',£机”=0
式中是力平面内任意三点,但不得共线。
稳度:稳度(定度性)是身体在外力的作用下失去平衡的难易程度。实践中身体稳 度的大小,直接影响着运动员动作的完成与技术的发挥,甚至决定比赛的胜负。从影响稳 度的因素而言涉及面较广,如身体重心的高低,支撑面、稳度角、平衡角、稳度系数的大小, 以及比赛时间、赛场环境、运动员的情绪等。
从散手防守角度讲,身体的重心在水平面的投影必须尽量接近支撑面中心成在有效 支撑面内。在特殊情况下,重心在水平面的投影必须落在支撑点上,并主动降低重心,增 大支撑面积和在受力方向上的稳度角,以此来提高身体的稳定性。从散手进攻的角度讲, 运动员应根据动作的目的和要求,适当提高身体重心,减小支撑面和稳度角,以便身体快 速、有力地启动。从攻、防两方面的情况可知,人体运动并非像物体运动那样一味追求稳 度,而散手运动又与其他一些体育项目如田径、游泳等有所不同。实战中,双方都千万百 计地寻找对方的弱点,捕捉战机,因而运动员的稳定性便体现出时而建立稳定的平衡,时 而乂主动或被动地打破自身的平衡。因此,无论是进攻还是防守都应使身体达到合理的 稳度,片面追求稳度是不可取的。运动中既要稳定性,又要灵活性。基于这一特点,对散手 运动的-般要求是:无论进攻与防守,完成动作之后都应迅速调整自身的稳度,使之处于 最佳姿势,为后-动作奠定基础,提供保证。
(二)运动路线与步法
运动路线:散手中运动路线的内溷较为丰富,既有身体重心、肢体重心的运动路 线,又有环节重心的运动路线。如将人体作为质点对待时,其运动路线是指身体重心移动 的轨迹。如分析拳法、腿法运动时,视肢体为质点,其运动路线是指肢体重心移动的轨迹。 如单…分析拳、脚运动时,其运动路线是指环节重心移动的轨迹。根据散手运动的特点. 无论是身体重心、肢体重心,还是环节的重心,其运动路线均有其运动的规律和特点。弄 清这些规律和特点,无疑对身体的稳定性、灵活性以及运动技术的发挥、运动成绩的提高 都是有益的。
运动路线-般分直线和曲线两种,而散手运动中考虑较多的是身体重心与拳、脚重心 的运动路线。
(1) 直线运动:身体重心和拳、脚重心的直线运动是散手运动中不可缺少的一种运动 形式。例如步法中的进步、退步、上步以及滑步等过程中,身体重心基本上是在前后、左右 方向上做直线运动。这种因步法的改变带动身体重心的移动,其运动幅度一般不太大,移 动的速度也较慢。从战术上讲,采用这样的运动形式一般是双方用于相互试探或引诱,而 不是处丁真正的进攻与防守过程之中。从力学角度来看,人体从静态到动态需要-•定的 时间,并需消耗…定的能量来克服静态时的惯性。因此身体启动慢,加速难度大。当身体 处于这种小范围、小幅度运动时,不断地交换步法、改变方向,使身体始终处于动态,保持 一定的惯性,因而提高了身体的灵活性和应变能力,便于身体启动和加速,为进攻或防守 都提供了便利条件。
拳、脚重心的直线运动往往发生在进攻过程中,较典型的如冲拳和踹腿等动作。在攻 方做好出击的姿势后,对准目标快速、有力地将拳或腿送出。实战中运动员常采用拳法、 腿法直线进攻,其主要原因在于,双方距离较近,拳、脚工作距离短,参与这类动作的肌肉 其工作状态好,体积大,因而动作速度快,打击力量大。另外,打击目标一般是对方的胸和 面部,对方所受的翻倒力矩较大,破坏其平衡的效果好,所以能起到重创对方的作用。
当然,无论是身体重心还是拳、脚的重心,其直线运动并非绝对的水平直线。因实战 中场上比赛激烈,情况复杂,运动员的姿势随着进攻与防守变化时刻在改变.所以身体和 拳、脚的重心所完成的直线运动有时是在水平面上,有时可能是在空间某一斜平面上。
(2) 曲线运动:身体重心与拳、脚重心的曲线运动是散手中最普遍的运动形式。无论 是进攻还是防守中都大量地存在着。根据动作的特点大体上可分为四类。第一,垂直平而 类,即运动中或是拳、或是脚、或是身体重心在空间任意垂直平面上做曲线运动。例如,拳 法中的抄拳,腿法中的弹腿,摔法中的过背动作(夹颈过背、插肩过背、抱腰过背、抱腿过背 等)。第一,水平面类,即运动中或是拳、或是脚、或是身体重心在水平面上做曲线运动,例 如,拳法中的横扣拳、腿法中的后扫腿等动作。第三,斜平面类,即运动中或是拳、或是脚, 或是身体重心在空间任意斜平面上做曲线运动。例如,拳法中的弹拳、腿法中的摆腿、摔 法中的插抱打腿等动作。第四,复合类,即运动中或是拳、或是脚、或是身体重心的运动并 非完全在上述三种任意平面上,而是动作过程中的某一段时间在某一平面上运动,而另 一段时间在其他水平面上运动。例如,拳法中的攒拳,动作的前一段在斜平而上,后一段 在水平面上;腿法中的横摆踢脚,动作的前一段在斜平面上,后一段在水平面上;摔法中 的抱腿别腿,被摔者前一段在矢状而上运动,后一段在额状面上运动。
从力学角度看.无论上述哪一类别,最终追求的还是动作的速度浦打击力量。为了达 到这一目的,在完成动作时应根据人体结构的特点,结合动作技术的要求,控制好各环节 运动的角位移、弧长和弧度。在开放式生物运动链中,由于自由度较多而构成运动的多样 性,因此,各个关节中的每一个运动都影响着远端环节的运动轨迹、速度和加速度一所以 在运动训练中必须使各关节的运动协调一致,以保证肢体和远端环节运动轨迹的准确性 及运动速度的平稳性。
另外,对于复合类型的动作,特别应注意环节运动的平滑性和连惯性。以免动作过程 中出现平面与平而之间的拐点,造成力量、速度、惯性等过多的损失。
步法:散手中步法移动的快慢、距离的远近以及移动的时机,直接影响着攻防的效 果。因此对步法的要求是:
活。是指步法移动、变换灵活敏捷。运动时轻松自如,虚实变换,让对手抓不住自 己的身体重心所在,给对方造成判断困难。准确地判断对手的重心位置是自己选用招法 的依据。例如对手用攒拳进攻,身体重心须落在前脚,如果在防守的同时以右勾踢腿攻击 其前脚,则必定获得较好的效果。这是因为对手重心在前脚,欲以前腿反击已不可能。那 么怎样使步法活呢'我们知道,在田径项目中,短跑的蹲踞式起跑比站立式起跑要困难, 途中跑加速要比静止时加速快,原理就是身体重心太低,下肢肌肉的负担重,静止状态£1 动没有初速度。不难理解,散手步法要活,首先力量是基础,膝关节、踝关节弹性要好;其 次在站立时两脚间距不宜太宽,两膝弯曲不能过大,身体重心不能过分靠近支撑面边缘, 比赛一开始身体就应处于小范围的活动状态,尽量避免“静态型”。
疾'是指步法移动的速度。拳谚说:“手到脚不到,破敌不得妙”“手打三分腿打七 分,胜人全凭脚下疾”。双方交手前都处在相持和窥视状态之中,互相保持着一定的距离, 任何一方发动进攻,都必须以快速的步法接近对方,在有效距离内施以攻势,进攻才有 效“同样,防守时也必须具备快速后退、躲闪的能力,防守方能成功。
准。是指步法移动的准确性。准确地移动步法,能为进攻、防守和防守反击赢得时 间。进攻时的步幅太小,则不能产生最佳的打击效果,又影响了第二次进攻和回位防守; 防守时步法移动的距离不够,有可能被击打,面移动过多,又不利于反击。把握步法移动 的准确性,主要取决于运动员的时、空感觉的能力,而这种能力的获碍,有赖丁氏期的实 践和不断的摸索。
(三)力量、速度与爆发力
力量:散手比赛时运动员处于你进我退或你攻我防的激烈拼搏中,所用方法必须 有一定的力度,才能做到“清晰有效”,同时才能给对方一种威胁。例如冲拳,要做到快速 有力,就要发挥脚、腿、甑、腰、肩的共同作用,协调配合。并应根据肌肉发力顺序的原则, 由大块肌肉首先工作,使身体(或环节)从静态变为动态,以利于身体(环节)启动;中等肌 肉次发力,使已获得一定速度的身体(环节)进一步加速;小块肌肉最后发力,主要是控制 拳的运动路线和幅度。这就是说,散手中的进攻动作都应从下肢有力的履地开始,通过躯 干,肩部的扭转来带动上肢,或通过转髓、摆臂提高下肢摆动腿的运动效果。一个进攻动 作仅靠局部力童是有限的,必须全身协调一致。同时在发力的一刹那,配合呼气、屏气蓄 劲,以气催力,达到意、气、力三者合一,最终达到增大打击力的目的。
搪度:众所周知,散手中动作速度之快慢是能否取胜的关键之一。怎样才能提高动 作速度呢?第-■,注意动作路线。只有动作的方法正确,动作规范,路线合理,才有利于提 高动作的速度。由运动学原理可知,运动体直线到达终点的距离眼短,时间最省,因而便 于运动体加速。当然,对于散手中非直线运动的一些动作,应注意肢体威环节的摆动幅 度,适当缩小转动半径来提高其摆动速度。第二,避免肌肉的松弛现象。根据肌肉收缩的 力学特点,肌肉不具有完全弹性,而具有明显的时间效应,收缩时间越长,其收缩力与搪 度就会越下降。所以攻击前肌肉不要过早地收铸,以免引起肌肉的疲劳和松弛。例如,正 确的冲拳方法是:拳将要打到目标的一刹那间才急搪把拳握紧。从生理学角度看,肌肉放 松的方法掌握得越好,就越能经济地使用能it和尽快地补充被消耗的能量。第三,改善肌 肉的协调关系。运动生理学的理论表明,提高神经中枢之间的协调性,能增加有关动作的 速度。其原因在于各协同肌群之间的协调关系得到改善,就能减低因对抗肌群紧张而产 生的阻力•从而更有利于主动肌群收缩,提高动作的搪度。
爆发力:人体功率的含意是将生物体化学能转换为机械能的转换搪度,也就是指 肌肉的机械功率。其实质是确定每单位时间所能转换输出的机械功值。若用P表示肌肉 瞬时输出功率值,F为瞬时肌力值,y为肌肉的瞬时收缩速度,则可由公式P=F-K计 测其瞬时功率的量值。
散手运动中由于动作的特点和目的性不同,人体肌肉瞬时功率的发挥特点也就有所 不同。通常所谓肌肉的爆发力,是指较短时间内产生一次性较大或最大的肌肉功率。例 如,散手中的各种拳法、腿法、摔法动作就要求这种形式的肌肉功率,而持续耐力性局期 性动作,如竞走、长跑等,则要求人体肌肉发挥持续耐力性功率。
实战中要提高动作的打击效果,实际上就要尽H提高动作的速度和打击力It,即提 高瞬时功率。对于动作的速度和打击力意仅靠某-环节或肢体的独立运动是不行的,必 须根据速度、力量的叠加合成原理,靠全身各环节的协调配合,最终在肢体或环节末端体 现出来。
(四)骨杠杆与肢体的攫动
骨杠杆:人休的各种运动动作,都可以模拟为一个运动机械,而任何一个运动机械 都是由动力产生或能量转化系统、动力转移传递机构和实际对外做功的装置这三个部分 组成。由此看来,人体的骨骼通过不同的关节为支点组成了可以转动的杠杆系统,完成肌 力的传递以实现对外做功。
从人体骨杠杆的形式来看,肌力作用于骨骼上,并以关节中心为支点形成杠杆来实现 各种运动。在分析散手动作时,身体主体部分的运动,如上肢、下肢和躯干,都可以理解为 简单的杠杆机械。根据这些简单的杠杆机械的动力点、阻力点和支点的相互位置乂可分 平衡杠杆、省力杠杆和速度杠杆。实战中可根据不同的战机和进攻目的合理运用不同类 型的杠杆。
(1) 平衡杠杆(又称第一类杠杆):此类杠杆的特点是支点位于动力点与阻力点中间匚 当身体或某一环节要维持某一霎势时,一般改变肌肉收缩的强度来达到身体或某一局部 的平衡。动力臂L越大,则肌肉的负担越轻,达到平衡所箫的动力(肌力)F就越小。对某一 肢体而言,该肢体重心离支点越远,对肌肉的负担就越重,此时无论肢体是保持平衡还是 做匀速运动,肌肉都需提高收缩强度、增大肌力以满足动力矩与阻力矩平衡之需。因这类 骨杠秆在人体中配布不多,散手运动中泣用较少,故不必举例说明。
(2) 省力杠杆(又称第二类杠杆):此类杠杆的特点是阻力点位于动力点与支点中间, 两力方向相反且动力臂始终大于阻力臂,属于使环节移动速度相对较慢、运动幅度较小的 骨杠杆。例如,散手进攻动作中为了提高打击力量和速度,有时箫伴随提踵,此时小腿三 头肌收缩产生动力,作用于跟骨结节上,身体的重力为阻力,足趾关节为杠杆的支点。从 骨杠杆原理讲,因动力臂大于阻力臂故可起到省力作用,但因阻力较大,所以要使骨杠杆 快速转动时就得靠肌肉做较大强度的收缩,使动力矩尽可能地大于阻力矩,以提高运动效 果。
(3) 速度杠杆(又称第三类杠杆或费力杠杆);此类杠杆的特点是动力点位干阻力点与 支点中间,两力方向相反,属于使环节移动速度快、运动幅度大的骨杠杆。但因人体绝大 多数肌肉的起止点附着在关节周围,而阻力点往往远离关节中心,所以构成了力臂小于阻 力臂,肌肉工作起来负担重而费力。这一类杠杆是身体上配布最多、应用最广的,散手进 攻动作中基本上都属于这一类。例如,弹拳、勾踢腿、抱腿过背等动作。从骨杠杆原理可 知,使骨环节转动,必须对它施加力矩,克服阻力矩来实现。当骨环节受到的力矩与阻力 矩大小相等时,骨环节就处于平衡和匀速转动状态。在实际运动中往往希望的是骨环节 快速转动,但因身体结构的特点使得力臂较小,所以运动中就要求肌肉强有力地收缩,肌 肉收缩强度越大,消耗的能量就越多。但从运动效果来看,太大提高了进攻的速度,这就 是“失之于能,而得之于速”之说。
应注意的是,人体运动中上述三类骨杠杆形式并非而定不变,它随着环节在空间位置 的改变而转换。
复制
浏览1,506次