方程:芬恩马奇(1935年)首次提出了肌肉收缩力量与收缩速度之间的关 系问题。但最著名的还是生理学家HiLL,他所建立的HiLL方程能更加明确地描述肌肉收 缩的力量与收缩速度的关系。HiLL的经典性工作奠定了骨骼肌力学的基础。HiLL方程 为:
(F+a)(矿+ b) = b(Fo + a)
式中F是肌肉收缩力.a是力量常数,V是肌肉收缩的速度,b是速度常数,Fo是肌肉 挛缩产生的肌力。
现 冬,P= b(Fo+ a)
故HiLL方程可表示为:
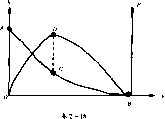
P =(F+a)(V+b)力一速关系曲线:根据HiLL方程建立曲线〈如图2-17)可以看出,曲线上有A、B 两个极端点。A点表明,当肌肉以最快的速度收缩时,所产生的肌力最小,即肌肉克服外 部负荷的能力最小。随着肌肉收缩速度的减慢,肌力就逐渐增加,当肌肉收缩速度进而减 小时,肌力也就进一步增加。当沿F—V曲线下滑到B点时,肌肉收缩的速度为零,此时 其肌肉收缩力量则达到最大值。
上述表明,肌肉既不能以最大的力量收缩,也不能以最快的速度收缩,而应以各自最 大的三分之…量为最佳匹配状态。即运动时既要考虑到力的大小,又要注意速度的快慢, 只有两者兼顾,才能产生最佳动作效果。如 —V曲线上的C点所示。这里要说明的是, 并非运动中其力量、速度都应有所保留,而是应根据这种理论来指导运动训练。如某运动 员要想提高自己某部位的肌肉力量,那么在负重练习时,应选用该部位肌肉能克服最大负 荷的三分之一量进行训练,这样效果最好。提高某部位肌肉收缩速度的方法是同样的道 理。
(三)肌肉收缩的功率
散手运动中如果运动员利用直拳、摆拳、踹腿等动作攻击时,从运动生物力学的角度 来评价其动作技术的好坏,往往取决于完成动作中肌肉功率的大小。即不仅要求肌肉收 缩的力量大,而且要求肌肉收缩的速度快。根据功率的定义可得:
P=A/t = F- S/t= FV
由此可知,肌肉收缩的功率等于肌肉收缩力量与其收缩速度的乘积。在运动生物力 学和运动技术理论中把肌肉的功率又称为爆发能力。
由功率的表达式可知,一定的肌肉收缩力与速度的乘积代表着一定大小的肌肉功率, 因此,其功率值可由肌肉收缩的力一速曲线得到(图2-18)。即在 —V曲线上任一点, 必然对应于一功率值。如F一矿曲线上的A点,表明肌肉收缩速度最快,而肌力最小。然 而A点正好对应于P—F(功率曲线)上的。点,从0点的位置来看正好代表着功率的最 小值。再从图2-18中的B来看,正好是两曲线的公共点,它既表明肌肉收缩速度最小、 肌力最大,又表明肌肉功率值最小。除这两个极端点以外,随着F—V曲线上点的变化,所 对应的功率值随之增加。当肌肉收缩速度与力量处于最佳匹配状态时,如C点处,此时肌 肉的功率值达到最大,即C点与D点对应,此后无论肌肉收缩速度与力量的匹配怎样变 化,其对应的功率值都要随之减小。这充分说明肌肉功率值的大小与肌肉收踹速度利力 量的匹配密切相关。因此训练中力量、速度都得兼顾,不能偏向某一方面而忽视另一方 而,否则是收不到好的动作效果的。
例如:体重、身高相同的甲、乙两运动员做上勾拳练习。测得甲的打击力量为150公 斤,其动作速度为10米/秒;乙的打击力量为200公斤,其动作速度为7. 5米/秒。从两运 动员的打击力量和动作速度来看,甲的打击力量比乙的差,而动作速度比乙的快。在这样 情况下我们很难讲谁的打击效果好。但从功率的角度我们就能得出正确结论。即有:
P , = ?> x 丫甲=150x10 = 1500 公斤•米/秒
"=丫乙 2 = 200x7. 5 = 1500 公斤.米/秒
由以上计算可知,甲、乙两运动员虽然在力量、速度上存在一定的差异,但其打击效 果却是一样的。作为教练员针对这两名运动员的情况,在制定训练计划时应考虑到,甲运 动员除了进一步加强速度素质训练外,要重点加强力量素质练习;乙运动员除了进一步 加强力量素质训练外,要重点加强动作速度练习。只有这样,两运动员的动作质量才能进 一步提高。
(四)散手运动中关节活动顺序原理
人体四肢由近端至远端的各关节所配布的肌肉的强弱,是随肌肉生理横断面逐个降 低。关节周围所配布的肌肉生理横断面大的称大关节,反之称小关节。这与人体活动时各 关节所遇到的阻力矩,由近端至远端依次减小的情况是一致的。
由于上述结构与功能条祥,人体活动时在其顺序方面表现出一定的规律和特点,这 些规律和特点对指导运动训练是十分重要的。
当某肢体需要克服大阻力,或需要表现出大的运动速度时,各关节的肌肉虽然同时 用力,但其中大关节总是首先产生活动,并依据关节的大小,表现出一定的先后顺序。即: 大关节首先用力,以克服物体(或环节)的情性,便于环节的启动;中等关节次用力,便于 环节进一步加速;小关节最后用力,主要是控制环节的运动幅度和方向。
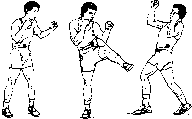
例如平勾拳的摆臂动作,首先是利用肩关节处的大块肌肉使之在水平面(或近似水 平面)做内收动作,克服肢体的惰性,改变肢体的运动状态,使之从静态变为动态;当肩关 节内收到一定程度时,紧接着利用屈肘肌群,进一步加大挥拳的速度,提高打击效果;当 要击中对方时,腕关节周围的肌群一定要紧张,并保持一定的拳势,以便摆臂的打击力更 好地通过,从而避免力的缓冲和分解C
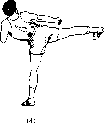
又例如弹腿动作,首先是调动馈关节周围的有关肌群做屈髓动作,使整个腿从静态 变为动态;接着是调动伸膝的肌群,进一步提高小腿的摆动速度;然后是调动踝关节的背 伸肌群做背伸动作。在做屈动作时,为了减小屈肌群不必要的负担,膝关节应处于自 然屈的状态,使之省力和缗短启动的时间,提高动作的隐蔽性。
以上例子说明,在完成动作的过程中,主动加强大关节的作用,充分发挥大关节的潜 力,真正做到以大(关节)带小(关节),才有利于动作的完成和发挥,提高动作技术的运用 效果。这是由于大关节处的肌肉体积和生理横断面大,产生的肌力矩大,因此克服阻力矩 的能力强,容易使环节产生角加速度的缘故。
(一}身体M心的概念与位置身体重心的概念:所谓身体重心是指人体各部分所受重力合力的作用点而言,也 就是说,任何物体都是宙无数微小的物质(分子、原子等)组成,这些微小物质都要受重力 的作用。人体也是如此,人体的微小生命单位是细胞,每个细胞也都受地心引力的作用。 这些引力构成-个空间平行力系,其合力就是人体的重力,重力的作用方向始终垂直向下 指向地心,重力的作用点就是人体的重心。
整个人体是宙头、躯于、上臂、前臂、手、大腿、小腿、足等多个环节所组成。每个环节 都要受到重力的作用。因此各个环节都有自己的重心,而环节的重心又决定了人体的重 心。当环节的重心变化时,人体的重心也就随之变化。身体重心的位置:据测定,当身体处于正常的解剖状态时,重心位置一般在身体正 中面上第三甑椎上缘前右方7厘米处。
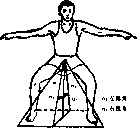
身体重心并不特指人体某一个固定点,它的位置是一个随机变量。从微观上讲,身体 重心有其特殊性。人体每时每刻都在进行着正常的呼吸、消化以及血液循环等生理过程, 因此人体自身的密度和质量分布时刻都在发生变化。它不像物体那样恒定在某一点上, 而是随着生理过程的进行,在一定范围内移动着。相对静止状态下,其变化范围一般在 1.5 -2厘米左右。从宏观上讲,人体可视为由14-16个环节组成(图2-19)。当环节的 位置发生变化时,身体的重心就要随之改变,其改变的方向和运动幅度是相对一致的。
向下运动时则重心下降,身体左右虚晃时则重心左右摆动,当身体的前屈或背弓动作幅度 较大时则重心会移出体外(图2-20)。
另外,由于性别、年龄、体型等因素不同,人体重心位置略有不同。一般男子重心位置 相对比女子高。当自然站立时,男女重心高度可用如下公式汁算:
男子:H =身高x56% 女子:日=身高x55%
因儿童的头和躯干的质量相对自身其他部位较成人的要大,故身体重心相对比成人 高些。对于身高、体重等同的运动员,上肢和躯干肌肉较发达者,其重心相对要高…些,而 下肢和臂部肌肉发达者,其重心相对要低一些。
(二)身体童心与动作技术的关系
身体重心的位置与体育动作技术的关系十分密切,散手运动也不例外。在动作过程 中,若身体重心控制得不好,不仅影响动作的协调性和自身的稳定性,而且还常常影响启 动的速度和身体移动的位移,使自己处于不利的被动状态。运动中究竟如何调整身体重 心的位置呢?下而仅从重心偏前、偏后、偏高、偏低几个方面加以分析。
- 重心位置偏前或偏后的实战姿势分析
(1)重心位置偏前的实战姿势特点:当两脚呈前后站立支撑时,如身体过于前倾,躯 千与水平面的夹角偏小,则使身体重心前移。此时,前腿各环节受力大于后腿。这种实战 姿势是不利于进攻的。因为进攻就要体现一定的效果(即动作的速度和打击力量),而制 约打击效果的直接因素之一是整个身体运动的幅度。因此,只有将身体重心适当后移,才 能达到使身体更好前移的目的,才便于拳、腿的进攻。根据运动中移动重心原则可知,支 撑重心的腿,能使人体做奔腾、跳跃动作,而不能抬腿移步'非支撑重心的睫(虚腿)则可 以做踹、蹑、蹬以及移步动作,但不能使身体腾、跃。由此看来,散手运动中身体重心在水 平面的投影与支撑脚的间距影响着身体的稳定性,虚腿只起辅助作用,但进攻则全靠虚 腿。从身体前移的幅度、速度和击打力量考虑,重心都不能过于偏前。
(2)重心位置偏后的实战姿势特点:当脚步呈前后站立支撑时,如身体过于后倾,则 使身体重心偏后。此时后支撑腿各环节的受力大于前腿。这种姿势既有利于提高前腿的 进攻速度和力量,又能增大双方的间距使自己免受击打。但由于身体的重量主要由后腿 承受,因而不利于快速后退或防守反击。在此状态下,对前腿的反应速度要求较高,一旦 要向后退防时,前腿需快速有力蹬地,推动身体向后运动,免受对手的击打c
- 重心位置偏高或偏低的实战姿势分析
(1) 重心位置偏高的实战姿势特点:身体自然放松,两脚间距小,两膝弯曲度不大,身 体重心则偏高。此时下肢各关节肌肉的负荷较小,肌肉不易疲劳,有利于进攻与防守。但 不利之处在于动作预兆较大,容易暴露战术意图,且支撑面较小,身体的稳定性较差。
(2) 重心位置偏低的实战姿势特点:无论两脚是前后或左右站立,下蹲支撑时,两脚 间距较大,下肢各关节弯曲度大(或是两大腿夹角较大),都会使身体的重心自然降低,因 而增大了支撑面,身体的稳定性较好。但此状态下下肢各关节肌肉的负担较重,不利于快 速启动和步法的调整。此外还会造成下肢肉的疲劳。因此在实战中不宜长时间地保持这 种姿势。
事实上,无论身体重心是偏前、偏后,或是偏高、偏低,对实战面言都不是绝对的。往 往应根据实战需要来选择,一旦进攻或防守动作完成,施立刻调整姿势和步法才是可取 的,才有利于下一动作的进行。
(三}在图片上测定人体童心的原理与方法
L原理:目前运动生物力学中很重要的一项任务是对运动技术进行生物力学诊断与 分析,这就要了解人体重心的运动轨迹、途度、加速度以及受力情况等因素的变化规律, 因此重心位置的计算显得十分重要。实际应用中要对大最的影片或录像画面中人体动作 进行重心位置的计算,这样的工作在影片解析仪上解决是很容易的。为了深人了解计算 原理和方法,这里以一张动作图片为例进行表述。
在具体计算人体重心之前,我们必须解决两个重要的问题,即人体各环节的重量与 各环节的重心位置如何确定。为了解决这两个问题,下面我们引出环节的相对重量与环 节的重心半径系数两参数。
(1)环节的相对重量(贞):人体各环节的重量叫做各环节的绝对重量,但在实际的实 验中,人体各环节的绝对重量是很难测到的。因此只能引出环节的相对重量的概念。各环 节的绝对重量与体重之比叫做各环节的相对重量,用“奇”表示。其表达式为:
环节的相对重量(亦)=
环节胃绝蓍精3')x 100%
或为:a, = R/p, p = flip
由上式可知,要知道环节的绝对重量(P),只需要知道环节的相对重量(a)数就行 了。布拉温与菲舍尔退过尸体切割的方法求得了身体各环节的相对重童数据。他们把整个
身体作为一个单位,那么身体各环节相对重量为:
头:0. 07(1)-»0. 07 躯干:0.43(1)—>0.43 上臂03(2)—>0. 06
前臂:0.02(2)—0.04 手:0.01(2)—0.027 大腿:0. 12(2)T). 24
小腿
:0. 05(2)->0. W 足:0. 02(2)*. 04
有了上述各环节的相对重量参数,就很容易求出各环节的绝对重量。例如某人重70 公斤,该人的头和躯干各有多重呢?
由公式Pi = aiP可得:
该人头的重量为:P*=a
s.xP = 0.07x70 = 4.9公斤
该人躯干的重量为:P
B=a
BxP = 0.43 x70=30.1公斤
(2) 环节重心半径系数(bi):有了身体各环节相对重量,就有助于确定各环节的重心 位置。布拉温与菲舍尔的研究结果表明,人体除头、手外,其他各环节重心是沿着环节的 纵轴分布的。例如,要确定大腿的重心位置,只需找到髓、膝的关节中心,然后将两关节中 心连结的长度均分为100等份,因大腿整个质量分布靠近髓关节,所以其重心就靠近髓关 节中心处。具体计算公式为:
环节重心半径系数(b.)=
环节重'嘱胸客渭距离"''loo%
环节的绝对长度(切
即为:氐=¥><100%, 或为
h=biL根据布拉温与菲舍尔的材料,各虾节的重心半径系数为:
躯干:0.44, 大腿:0.44, 小腿:0.42
足:0.44, 上臂:0, 47, 前臂:0.42
关于头的重心位置确定的方法是:从耳廓上缘做垂直线与两眉中心垂直线的交点, 即为头的重心位置。对于平面图而言,正面在两眉中心,侧而在耳廓上缘。当手是掌状时, 其重心值于中指的掌骨小头处;当手是拳状时,其重心位于几何中心。
(3) 力矩合成法求人体重心的基本公式:在图片上测定人体重心,其实际原理就是利 用力矩合成原理。此方法又称为分析法。按照布拉温与菲舍尔的人体模型,我们已有了确 定各环节重量和各环节重心的方法。当各环节的重量和重心确定以后,便可求得各环节对 X、Y轴的力矩,面各环节的重力对同一轴的力矩代数和就是身体重心对该轴的力矩。其 公式为:
P , X=£piXtP ・ y = £ "
因面可得
X= E; *又
P, = aiP・Xi寸
p = L a, * *
-Yi 「
p = La, - y.式中,X、Y分别为身体重心的坐标,X、R分别为环节重心的坐标。
根据上述可知,X-. X都可直接在图片上用尺量出,那可直接引用布拉温与菲舍尔的 实验数据,于是身体的重心便很容易求得。
2.力矩合成法测定人体重心的步骤:
(1) 步骤
在图片上确定出各关节中心。
连接相邻两关节中心,并量出各环节的长度(L)。
利用公式/. = b, • L计算出各环节的重心位置,并在图片上表示出来。
确定头、手的重心位置。
在图片的平面内任意建立一直角坐标系OXL并测量出各环节重心的、%坐标=
分别算出各环节对x、y轴的相对力矩 心和 时,。
利用公式X = £ a编、£ a”求出各环节相对X、Y轴的合力矩。
最后在图片上标明人体重心的X、y坐标。
(2) 测定人体重心记录表(表2 -11)
«2-11力矩合成法测定人体■心记录表(单位:11米)
环节
名称 |
环节
长度 |
环节的相 对重量(a) |
环节的重心坐标 |
环节的相对力矩 |
X, |
力 |
aii. |
a;y, |
头 |
|
0. 07 |
|
|
|
|
躯 干 |
|
0.43 |
|
|
|
|
上皆 |
左 |
|
0.03 |
|
|
|
|
右 |
|
前膏 |
左 |
|
0.02 |
|
|
|
|
右 |
|
手 |
左 |
|
0.01 |
|
|
|
|
右 |
|
大腿 |
左 |
|
0. 12 |
|
|
|
|
右 |
|
小腿 |
左 |
|
0.05 |
|
|
|
|
右 |
|
足 |
左 |
|
0.01 |
|
|
|
|
右 |
|
合计 |
|
X = |
|
四、微手运勒中身体稔定性新
(一)身体平衡的力学条件与特点
散手运动中身体的平衡,不仅影响着攻防转换的速度,而且影响着完成单个动作的 质量。因此,平衡问题是绝对不能忽视的一个方面。
维持身体平衡的力学条件:身体的静止与平衡是有限制的运动结果。运动是绝对 的,静止是相对的,只有具备一定的条件,才会出现静止和平衡。然而人体平衡的条件是 多方面的、复杂的,这里我们只讨论力学条件。
为了使身体保持静止和平衡,必须使作用于身体的一切外力相互平衡。也就是说让 通过身体重心的各力的合力等于零,而且必须使不通过身体重心的合外力矩的总和也等 于零”只有这两个力学条件同时满足,身体才能保持平衡状态,其数学表达式为:
£Fi= F.+ Fi……+ Fi……+
Fn=O(身体不产生平动)
Mi= Mi + Mi + + Mi + Mn=F> x Li + F2x Li + FiX Li + + F x L. =0(身体不产生转动)
显然,运动中身体所受的力以及力矩满足上述力学条件时,则既不发生平动,也不发 生转动而处于平衡状态。
在人体静力性动作中,能满足上述力学条件的重要因素是肌肉力量,它的大小取决 于身体各部位和整个身体相对支点的位置。人体局部平衡是整个人体平衡不可缺少的- 部分,而整个人体平衡也是由各个局部平衡来实现的。
- 维持身体平衡的特点
(1)维持身体平衡的力学特点:关于这一问题,我们以前腿侧瑞技术为例来分析其特 点。
前腿侧踹这种腿法,脚的高度一般可分三类。第一类是脚高与肋平,当对方重心偏高 而且手的防护不严时,攻击目标是胸、肋部位。对于这样的攻击部位,打击点相对支撑点 的力臂大,产生的翻倒力矩较大,因而很容易将对方击倒。第二类是脚高与靓平,当对方 重心偏前时,攻击目标是髓部c击打此处,力量相对集中而不易分解与缓冲。第三类是脚 高与膝平,当对方重心偏后时攻击目标是膝部。攻打此处,对方因重心偏低,灵敏性较差, 加之难以防守,因此成功率较高。这三类攻击方式中无论哪一类,对自身支撑腿的技术要 求都很高,因支撑腿不仅要支撑自身的重量,而且还要帮肋维持身体的平衡。支撑腿稍 屈,可降低自身重心,提高自身的稳度。另外,支撑腿的脚尖外摆,增加了自身在攻击方向 的稳定角,同时身体以支撑腿的脚尖为轴的转动,不仅起到了一定的定向作用,而且还使 支撑腿股骨大转子后旋,挣脱靓臼的约束,增大了腿的运动幅度和打击力量。
在侧踹腿连同臂部一起向攻击方向移动时,由于身体重心也随之向攻击方向移动, 支撑腿也在肌肉的牵拉作用下,因而产生了微小的滑步。这样又重新调整了身体重心,使 之始终位于支撑面内,保持了身体的平衡。
总之,其力学特点是,适当降低重心,增大自身稳度,集中打击力量,合理选择打击点, 及时调整重心建立新的平衡。
(2)维持身体平衡的生物学特点:人体不仅可以保持平衡,而且在平衡遭到破坏时还 能采用一些有效办法恢复自身的平衡.当然,这必须通过视觉和本体感觉,在大脑皮层的 控制下,靠肌肉的收缩创造平衡的力学条件,达到恢复和维持平衡的目的。例如,在利用 侧踹腿进攻时,腿部连同臂部一起向攻击方向移动,此时身体重心必然向支撑面边缘靠 近,稳度就会下降,这时就有失去平衡的可能。在这种情况下,除支撑腿按上述力学规律 做出相应的动作维持身体的平衡外,身体内部也在神经的调节下作出相应的反应来维持 身体的平衡。例如反射性地调节支撑腿各关节周围肌肉收缩的强度、加强下肢各关节周 围韧带紧张的程度等,对于这种调节,在运动过程中完全达到自动化。当然,这种调节的 能力,有训练和无训练的人是有较大差别的。因此,在平时的练习中要经常进行单腿支撑 的平衡练习,以提高肌肉的感觉和调控能力。
(二)散手运动中影响身体稳定性的因素
在运动实践中,人体平衡姿势稳定性的好坏,对完成各种动作具有直接影响。因此提 高这类动作的稳定性是十分重要的。
平衡的稳定性反映了身体维持原有平衡状态和抵抗翻倒的能力,在散手运动中基本 上都属于下支撑平衡问题。然而影响这类平衡的因素有哪些呢?下面我们从力学因素和 生物学因素两个方面进行叙述。
- 力学因素
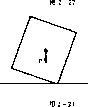
(4)支撑面的大小:人体在下支撑平衡中,都有一定的支撑面。支撑面积愈大,总的来 讲人体平衡的稳定性也愈大。所谓支撑面是由各支撑部位的表面积及它们之间所围成的 面积组成。如直拳攻击时,两脚处于有支撑状况,此时的支撑面积为,两脚着地面积加上 两脚所围成的面积之和,如图2-21的阴影部分。当用腿攻击时刖只有一只脚处于有支撑 状态,此时的支撑面仅有一只脚着地的面积。因此,用拳攻击时支撑面大,身体的稳定性 好;用腿攻击时支撑面小,且身体的稳定性相对要差。这就是说,运动中支撑面;®大,身体 的稳定越好,反之则差。
图 2-2
L

(2)重心的高低:重心的高低对身体的稳定性有较大的影响。一般来讲,重心愈低稳 定性愈好。因此,运动中无论进攻还是防守都应适当降低自身重心,提高稳度。
以上两点只能-般地说明身体稳定性大小,而不能反映不同方向上稳定性的差异。
如甲运动员做直拳动作时,他在前后方向上的稳定性就比左右方向的要好。此时如甲运 动员在左右方向受到对方的攻击(如对方用摆拳或摆腿攻击),他在左右方向就容易失去 平衡。由此可见,身体平衡的稳定性还取决于自身重心在支撑面投影的相对位置,重心投 影点越靠近支撑面边缘的某一侧,那么身体在该侧的稳定性就越差。对此,我们引出稳定 角和平衡角的概念。
(3)稳定角:所谓稳定角就是重力作用线和重心至支撑面边缘相应点连线的夹角(如 图2-22)。稳定角越大,身体的稳定程度越大,即身体在某方位上平衡稳定性的储备能力 越大。稳定角能定量说明身体在多大范围内倾倒时,重力仍产生恢复力矩使身体回到原 来的平衡位置。一旦身体倾斜角度大于稳定角时,重力就产生倾倒力矩,使身体加速翻倒 (图2-23)。由此可见,稳定角综合地反映了支撑面大小、重心的高低及重心的投影在支 撑面上的相对位置这三个因素对稳定性的影响。如果增大某方位的稳定性,则要增大在 此方位上的稳定角C

(4)平衡角:平衡角等于某方位平面上稳定角的总和,如图2-22所示,(色+皿)为左 右方位的平衡角,(a, + a,)为前后方位的平衡角。平衡角在不同的方位平面上可能是不同 的。应注意,平衡角是反映身体在某一方位平面上稳定程度的,而稳定角只是反映身体某 一侧的稳定程度。
(5)稳定系数:当身体处于某一姿势时是否会失去平衡,除了用上述几种方法定性判 断外,还可用稳定系数来定量判断。当身体开始倾斜时,由于重心的升高,重为产生一个 使身体恢复到原来平衡位置的恢复力矩,恢复力矩等于重力的大小乘上重力对倾倒支点 的力臂。在身体倾倒的过程中,如恢复力矩大于倾倒力矩,即重力作用线在支撑面内,那 么恢复力矩能使身体回到原来的平衡位置上。若在身体倾倒过程中,重力相对支点的力 臂不断缩小,则随着倾倒的加剧恢复力矩不断减小。当身体倾倒程度进一步增大使其重 力作用线通过支点时,恢复力矩变为零。此后重力矩则变为倾倒力矩反而加剧身体倾倒 的作用。若有一倾倒力作用在如图2-24所示的物体上,则倾倒力所产生的倾倒力矩为 倾倒力乘IU对倾倒支点力臂的乘积。因此,稳度系数就定义为稳定力矩与倾倒力矩的比 值:为稳度系数,当K> 1时,物体本身的重力所产生的恢复力矩足以抵投倾倒的作 用,即稳定力矩大于倾倒力矩,此时倾倒力不能使物体倾倒。当K <1时,物体的稳定力矩 对抗不了倾倒力矩,倾倒力将使物体倾倒,平衡被破坏,即静力性姿势被改变。从此角度 来看,物体越重,稳定力矩越大,抵抗倾倒作用的能力也就越强。
例如,某运动员以图2-25a所示姿势站立,运动员体重70公斤,两脚间距为0.5米, 现有20公斤的力从侧而水平作用在他身上,作用点距地而高度为1米。若该运动员在受 到此打击力过程中姿势不改变,试求:①当更力作用线在支撑面正中央时的稳度系数。② 若该运动员将重力作用线移到离左脚B点5厘米,如图2-25b所示,讨论其左右方向上 的稳定程度。③若该运动员将两脚间距增大到1米,如图2-25c所示,求此时重力作用线 在支撑面正中央时的稳度系数。
解:外加侧面水平力对右脚A点的倾倒力矩为:
M.
w = 20xl=20 公斤米
此力矩趋向于使运动员绕A按逆时针转动。反抗这个倾倒力矩的是运动员自身重力 对A点的稳定力矩也(为了问题的简化,暂不考虑肌力的作用)。
运动员以右脚A点为支点所受稳定力矩为:o =7。乂号=17. 5公斤米
由稳度系数定义有:火=#理=嵯=0.875 < 1
M帝 20因K < 1,故运动员将绕4点产生逆时针转动而失去平衡。当运动员将重力作用线移到离左脚B点5厘米处时,重力矩的力臂为:
- 5 - 0. 05=0. 45 米。
如=70 xQ 45 =31. 5 公斤米
因倾倒力矩不变,所以有:*>磐=哪=1.575 > 1
修倾 20
此时平衡将不会被破坏,但这样移动后,右边的稳定力矩减小了,只有3. 5公斤米,容 易倾倒,因此在散手实战中,每一动作姿势保持的时间不宜太长,应随时变换,以防不测。当运动员将两脚间距增大至1米时,M,・=70x0.5 =35公斤米;侦=70x0.5 公斤米=35公斤米
因此,左右的稳定力矩都增大,不管左边还是右边受20公斤米的倾倒力矩的作用,都 不能破坏身体的平衡。
从上面的分析可以发现,决定下支撑稳定平衡状态的因素,从稳定系数的组成来看 有:①重力作用线到支撑面相应边界的距离,②人体(或物体)的重量c在第一因素相同的 情况下,体重越大,稳定性越好。所以在摔跤、拳击、散打等搏击项群的比赛中,运动员要 按体重分等级,原因就在于此。生物学因素:人体平衡不同于一般物体的平衡,因为人体不仅是一个力学系统,而 且还是一个生物学系统,具备高级神经活动等特殊因素。这些因素主要体现在以下几个 方而。
(1) 神经系统的影响:人体平衡与一般物体平衡的重要区别之一,是破坏物体平衡的 干扰因素仅来自于外界作用,而破坏人体平衡的干扰因素不仅来自于人体以外的作用. 还来自于人体本身。例如视觉和本体感受器的误差,会造成身体肌肉用力的不均匀,导致 力矩的改变。另外,改变支撑而内的压力分布,也有可能破坏平衡。
(2) 心理因素的影响:破坏人体平衡的另一个生物学因素是心理因素。运动员心理紧 张时,容易破坏收缩肌群的协调工作,导致支撑面内压力不均,使人体失去平衡。因此,心 理素质的训练也是提高人体平衡稳定性的一个重要方而。
(3) 肌肉力量的影响:从力学角度看,人体不是一个单块刚体,而是~个多刚体系统< 这个刚体系统的平衡是靠肌肉收缩固定住各关节而实现的。如果肌肉力量弱,固定不住 各关节,人体就会发生变形,平衡则被破坏。对某一个关节而言,如果成对肌肉收缩强度 不同,产生的肌拉力矩也就不等,同样也会破坏人体的平衡。例如,某运动员为了提高腿 法进攻的效果而练习单腿站立时,开始则身体的平衡能力较好,时间一长因下肢关节的 肌肉收缩的改变,使得相应骨环节所受的肌拉力矩不平衡,此时人体则开始左右或前后 晃动,其稳定性明显下降。因此,肌肉力量是维持人体平衡的一个重要前提。
浏览2,091次