|

|
(1) 柔道运动中力的概念
柔道运动中所有的技术动作,只有用力得法才能达到技术效应。因此,柔道技术动 作必须考虑用力方法。力就是物体之间的互相作用,这种互相之间的作用使物体改变运 动状态或发生形变。从事柔道运动时,身体各部分互相作用、攻守双方进攻或防守、互 相扯拉或施技摔倒或被摔倒,都是力在起作用,这些力的作用可使双方身体改变运动状 态或发生变形。物体运动状态的变化或变形为力的效应。力作用于物体时,其效应如 何,取决于力的大小、方向和动作位置(作用点)三个要素。
① 力的大小和方向:力量大小可以用重量码测定。通常拿物体重量作为力的单位, 用公斤来表示。在柔道竞赛中如用较小力量制服较大力量,就是施展柔道技术力量的诀 窍。柔道选手学习技术的时候,必须探索这种施展技术力量的诀窍。力的方向包括力的 “方位”和“指向”,例如重力的方向是竖直向下的,这时“竖直”是力的方位,而“向 下”是力的指向。例如柔道技术中的外卷入和内卷入技、直舍身技和横舍身技,攻手是 用自身的重力揪住受手摔倒下去的。
② 力的作用位置:一般来说力的作用位置不是在一个点上,而是在物体的某一部分 面积上,当力的作用面积很小时,此时的力叫集中力,例如攻手施内股技:一腿进受手 裆部,另一腿支地,上体和头面向后方位扭转,就可以看出力的作用位置在一条支撑腿 的散上,这个位置也可叫作用点,此时的力叫集中力。作用点不是集中在一点上叫做分 布力,如做寝技抱压技时,就是一种分布力。但也可以用与分布力产生同样效应的集中 力来代替分布力,控制在受手人体重心一点上,在这一点上所产生的效应和分布力所产 生的效应是相同的。因此,研究抱压技时,应了解人体仰卧时身体重心转移到上体。例 如,不让受手解脱抱压技,只须控制胸口处。
③ 内力和外力:外力是指其他物体对所研究的物体系的作用力,内力是指物体系内 部各物体互相作用的力。内方和外力是相对而言的。如果把人体看做一个力学系统,那 么,来自人体外界作用于人体的力称为人体外力;例如重力、支撑反作用力、摩擦力等。 只有外力才能引起整个人体运动状态的变化。应该指出,内力与外力的区别取决于我们所 选取的研究对象。例如,对人体来说,前臂的屈肌群拉力是内力,但是把前臂作为研究 对象,则变为外力。人体内力不能直接引起人体整体的运动。但是,人体与外界物体接触 并相互作用时,内力可引起外力。柔道技术要得到最佳效果,必须身、手'、腿合一,动作 协调一致,才能加大对手所受的外力或改变外力的方向,从而收到最好的施技效果。
(2) 人体在柔道运动中常见的外力
最常遇到的有重力、支撑反作用力和摩擦力。
① 重力:我们都知道,在地面上任何物体都有重量,人体的重量叫体重,这是重力 的作用效果。重力实质上就是指地球上的物体所受到的地球引力,在地面上的人和物, 都不可避免地受到重力的作用。重力的大小就是重量,它的方向垂直向下指向地心,无 论人体采取什么姿势都是如此。重力在人体的作用点就是人体的重心。如果物体的质量 为m,则物体所受到的重力大小为G = mg,其中g为重力加速度,在计算时常取g = 9.8 米/秒2。
② 支撑反作用力:力是一个物体对另一个物体的作用,那么这个物体对另一个物体 发生作用时,另一个物体对这个物体也会发生作用。如:当我们用手击桌子时,往往只 是注意到手对桌子的作用,而手感到疼痛就是桌子对手反作用的结果。由此可知.一个 物体对另一个物体的作用力必然引起另一个物体的反作用力,作用力与反作用力的大小 相等,方向相反,而且分别作用在两个不同的物体上,它们同时存在,同时消失。例 如:当一个体重为70kg的运动员站在地面上时,地面向上给他的反作用力同样是70kg。 当他用自身重力突然向下给地面100kg的作用力时,地面也向上给他100kg的反作用 力。因此,攻手要加大作用力,可用自身的重力加大受手向下的作用力。如果此力大于 受手的抵抗力,受手就会被摔倒。
③ 摩擦力:相互接触的两物体,在接触面上发生的阻碍相对动作或相对运动趋势的 相互作用力,称为摩擦力。物体所受摩擦力的方向总是与其运动或趋势的方向相反。摩 擦力一般分为静摩擦力与滑动摩擦力两种,柔道运动中最为常见的为静摩擦力。相互接 触的两物体有相对滑动趋势而又保持相对静止时,在接触面上产生阻止其出现相对滑动 的力。如.:当攻手拉受手要施技时,双方运动员的脚部均受到摩擦力的作用,攻手的前 后脚的受力如图3-6-1所示,前后脚所受的摩擦力均为静摩擦力,后脚的运动趋势向 后,所以摩擦力方向向前;前脚的运动趋势向前,所以摩擦力的方向向后。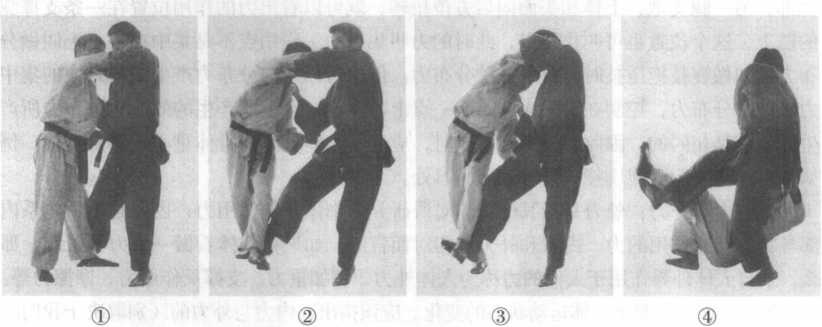

⑤
图3-6-1出足扫技术动作
2. 画受力图应注意的问题
(1) 研究对象所受的重力。
(2) 与研究对象相接触的其他物体对它的作用力(支撑反作用力、摩擦力)。
(3) 只画外力不画内力,当研究对象为一人或更多人时,肌肉力为内力。当研究对 象为两人或两人以上时,人与人之间的作用力与反作用力均为内力。
(二)人体重心
地球上的物体无不受重力的作用,物体重心是指物体各部分重力的合力的作用点, 人体也不例外。人体全部肢体(环节)所受重力的合力的作用点就叫人体重心或人体总 重心。由此可知,人体重心不像物体那样恒定在一个点上。
1. 人体模型
在运动生物力学研究中,为了突出主要矛盾,需把人体(研究对象)进行简化处 理,看成力学模型。常用的力学模型有质点、刚体和多刚体系统。多刚体系统是指由许 多刚体(环节)组成的链状系统,这就是人体模型。
(1 )人体模型中的假设(条件):
① 每个环节都有固定的质量,而且它只集中在环节重心上; 行
② 运动时,环节重心在该环节的位置不变;
③ 各环节之间的连接(关节)是皎链联接的点;
④ 运动时,环节绕其重心的转动惯量不变。 Uhdl
(2)柔道项目中常采用的人体模型 Ny
①日本(松井秀治)模型:把人体分为头、颈、躯干、上 nr 臂、前臂、手、大腿、小腿和足等15个环节(图3-6-2 )o松井 \J\J
测得的人体各环节相对重量(环节占体重的百分比)与环节相对 oo
重心半径系数(环节重心至该环节近侧端距离与该环节长度的比 南 “ °
囹 3-0-2 值)如表3-6-1和表3-6-2所示。
? 3-6-1人体各环节相对
环节
男子
女子
头
0.044
0.037
颈
0.033
0.026
躯干
0.479
0.487
上臂(两侧)
0.053
0.051
前臂(两侧)
0.030
0.026
手(两侧)
0.018
0.012
大腿(两侧)
0.200
0.223
小腿(两侧)
0.107
0.107
足(两侧)
0.038
0.030
表3-6-2各环节重心半径系数
环节
男子
女子
头
0.63
0.63
颈
0.50
0.50
躯干
0.52
0.52
上臂
0.46
0.46
前臂
0.41
0.42
手
0.50
0.50
大腿
0.42
0.42
小腿
0.41
0.42
足
0.50
0.50
②苏联(扎齐奥尔斯基)模型:原苏联扎齐奥尔斯 基与谢鲁扬诺夫应用放射性同位素扫描的方法,在运动 员活体上测定人体重心,取得了重要研究成果。该模型 将人体分为头、躯干上部、躯干中部、躯干下部、上臂、 前臂、手、大腿、小腿和足等16个环节(图3-6-3 )□ 通过对100名运动员的测试研究,得到身体各环节相对 重量与环节重心半径系数(表3-6-3 )o另外,还根据运 动员身高、体重建立了计算各环节绝对重量的各项回归 方程等。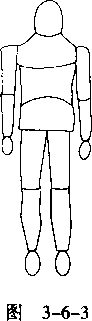
? 3-6-3人体各环节相对■■与童心半径系敷
环节名称
相对重量
重心半径系数
足
0.01311
0.4415
小腿(一侧)
0.0433
0.4049
大腿(一侧)
0.14165
0.4549
手(一侧)
0.00614
0.3691
前臂(一侧)
0.00615
0.4274
上臂(一侧)
0.02707
0.4498
头
0.0694
0.4998
躯干上部
0.15956
0.5066
躯干中部
0.16327
0.4502
躯干下部
0.11174
0.3541
浏览786次