|

|
(-)运动自由度
从力学观点来看自由度是描述物体位置的独立坐标数或是指允许自由活动的可能性。对于擒拿技术来讲是应用自由度来研究和掌握人体运动链某子系统、某环节、某关节自由活动的多种可能性。
人体的运动是在三维空间中进行的研究人体的运动首先要建立三维坐标体系即建立三个线度相互垂直的空间坐标系对人体运动来讲就是矢状轴、额状轴、垂直轴(图1-10)。
一个不受约束的物体处于完全游离状态自身不转动可以在三个方向(矢状轴前后、额状轴左右、垂直轴上下)上平动称为三个平动自由度。当一个物体一点固定(不发生平动)它可绕这三个轴转动即有三个转动自由度。这三个轴上的三个平动自由度和三个转动自由度对人体运动来讲共计最多只有三个自由度。
第一章实用擒拿技术的基础知识第一章实用擒拿技术的基础知识在研究人体或某一环节(肢体)的自由活动可能性(自由度)时并非每个环节或关节都有六个自由度而是要依据关
第一章实用擒拿技术的基础知识
第一章实用擒拿技术的基础知识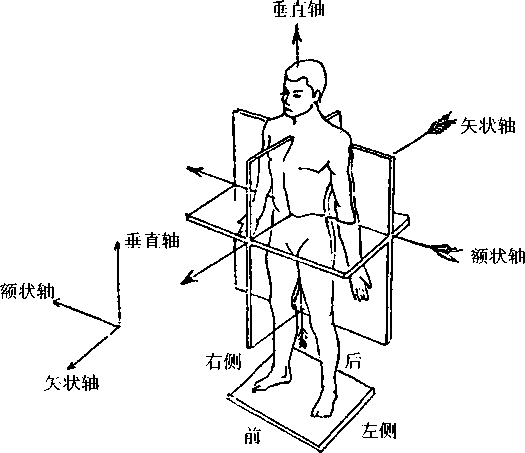
图1-10人体在三维空间的三个运动轴
节的结构特征、运动链系统中相邻关节的支持和制约作用以及要看是相对那一个环节或关节而言的。例如肩关节固定上臂(肱骨)只能绕三个基本轴有三个转动自由度而不能平动无平动自由度肘关节固定只能使前臂有两个自由度指间关节限制手指只有一个自由度手相对肘关节和肩关节就会有不同的自由度。
在开放式运动链中自由度可以相加但最多不超过六个(三个平动、三动转动)。例如人体上肢运动链子系统由上臂、前臂和手构成开放式运动链这个运动链的游离末端(手)可活动的自由度较多。上臂对肩关节有三个自由度前
臂对肘关节有两个自由度手对棱腕关节有两个自由度合起来对肩关节有六个自由度因而以肩关节为支点手的活动范围很大手可以达到以手臂长为活动半径所形成的方圆范围内的任意点上。
浏览1,005次